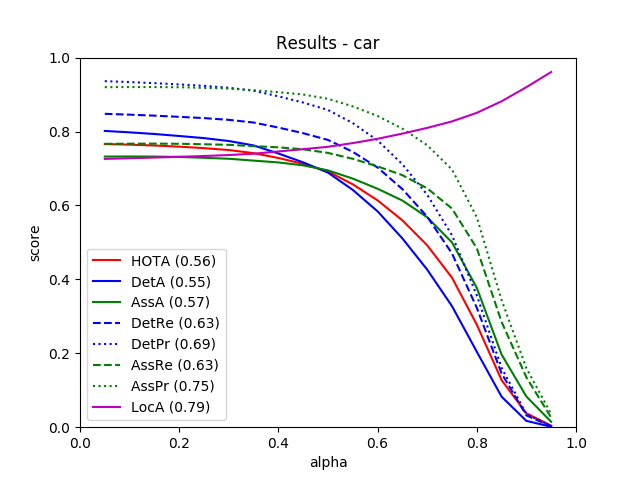
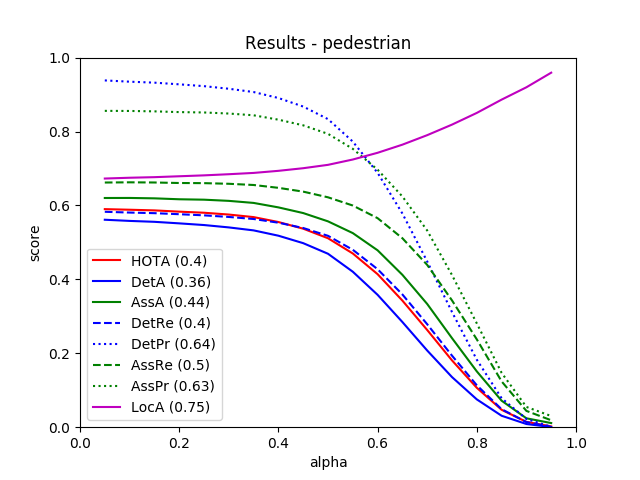
From all 29 test sequences, our benchmark computes the HOTA tracking metrics (HOTA, DetA, AssA, DetRe, DetPr, AssRe, AssPr, LocA) [1] as well as the CLEARMOT, MT/PT/ML, identity switches, and fragmentation [2,3] metrics.
The tables below show all of these metrics.
| Benchmark |
HOTA |
DetA |
AssA |
DetRe |
DetPr |
AssRe |
AssPr |
LocA |
| CAR |
55.82 % |
54.95 % |
57.34 % |
62.56 % |
69.08 % |
62.58 % |
74.77 % |
78.82 % |
| PEDESTRIAN |
39.56 % |
36.07 % |
43.63 % |
39.74 % |
63.97 % |
49.54 % |
62.82 % |
75.35 % |
| Benchmark |
TP |
FP |
FN |
| CAR |
26969 |
7423 |
4175 |
| PEDESTRIAN |
12328 |
10822 |
2053 |
| Benchmark |
MOTA |
MOTP |
MODA |
IDSW |
sMOTA |
| CAR |
65.07 % |
75.80 % |
66.28 % |
414 |
46.09 % |
| PEDESTRIAN |
43.32 % |
70.74 % |
44.38 % |
247 |
27.74 % |
| Benchmark |
MT rate |
PT rate |
ML rate |
FRAG |
| CAR |
39.85 % |
50.00 % |
10.15 % |
548 |
| PEDESTRIAN |
20.27 % |
38.14 % |
41.58 % |
577 |
| Benchmark |
# Dets |
# Tracks |
| CAR |
31144 |
838 |
| PEDESTRIAN |
14381 |
274 |
This table as LaTeX
|
[1] J. Luiten, A. Os̆ep, P. Dendorfer, P. Torr, A. Geiger, L. Leal-Taixé, B. Leibe:
HOTA: A Higher Order Metric for Evaluating Multi-object Tracking. IJCV 2020.
[2] K. Bernardin, R. Stiefelhagen:
Evaluating Multiple Object Tracking Performance: The CLEAR MOT Metrics. JIVP 2008.
[3] Y. Li, C. Huang, R. Nevatia:
Learning to associate: HybridBoosted multi-target tracker for crowded scene. CVPR 2009.