In training default parameters, except:
opts.nNeg = 10000;
opts.nAccNeg = 50000;
opts.nWeak=[32 128 512 2048];
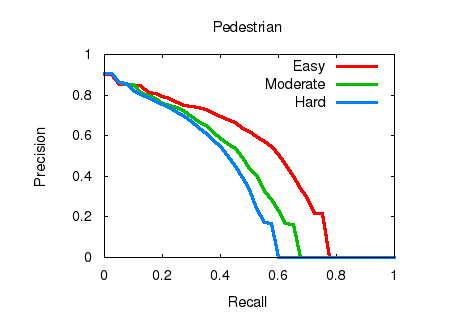
Pedestrian:
opts.modelDs=[50 20.5]; opts.modelDsPad=[64 32];
opts.pJitter=struct('flip',1);
opts.pBoost.pTree.maxDepth = 3;
opts.pLoad={'squarify',{3,.41}, 'lbls',
'Pedestrian'},'ilbls',{'Cyclist',
'Person_sitting', 'DontCare'}, 'hRng',[50 inf] };
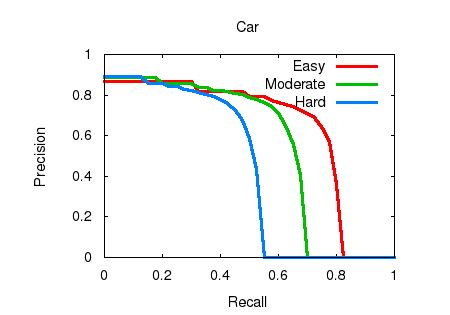
Car:
opts.pBoost.pTree.fracFtrs=1/16;
opts.pLoad={ 'lbls',
{'Car_model_equalto_i'},'ilbls',{'Van', 'Truck',
'DontCare','Car_model_differentto_i'},'hRng',[25
inf] };
model_i= 1 or 5: (sideviews)
opts.modelDs=[50 150]; opts.modelDsPad=[64 176];
model_i= 2 or 4 or 6 or 8:
opts.modelDs=[50 100]; opts.modelDsPad=[63 115];
model_i= 3 or 7: (frontal and rear views)
opts.modelDs=[50 75]; opts.modelDsPad=[63 91.5];
-------------------------------------------------
------------
In testing:
detector =
acfModify(detector,'cascThr',-1,'cascCal',0);
detector = acfModify(detector,'nOctUp',1);
NMS = 0.5; |
@article{Dollar2014PAMI,
author = {Piotr Doll\'ar and Ron Appel and Serge
Belongie and Pietro Perona},
title = {Fast Feature Pyramids for Object
Detection},
journal = {PAMI},
year = {2014},
}
@misc{PMT,
author = {Piotr Doll\'ar},
title = {{P}iotr's {I}mage and {V}ideo
{M}atlab {T}oolbox ({PMT})},
howpublished =
{\url{http://vision.ucsd.edu/~pdollar/toolbox/doc
/index.html}}
} |