Submitted on 19 Sep. 2018 09:46 by Jifeng Shen (Jiangsu university)
|
Method
Detailed Results
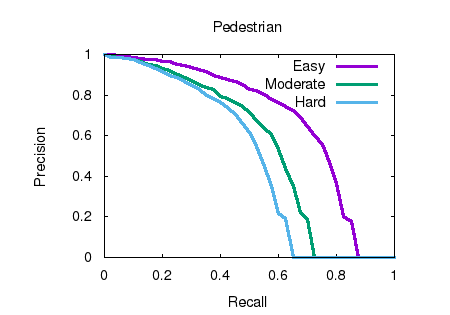
Object detection and orientation estimation results. Results for object detection are given in terms of average precision (AP) and results for joint object detection and orientation estimation are provided in terms of average orientation similarity (AOS).
|