Submitted on 14 Mar. 2023 05:00 by Lin Zhao (Beijing Institute of Technology)
|
Method
Detailed Results
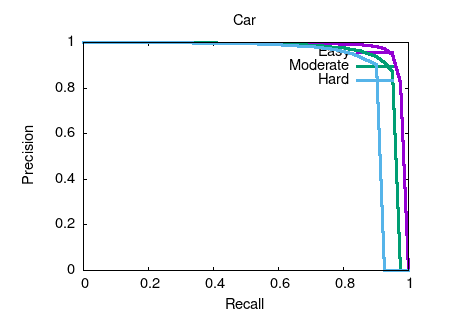
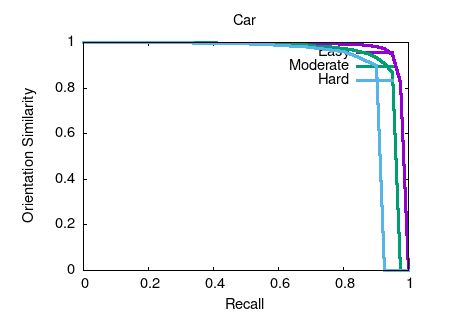
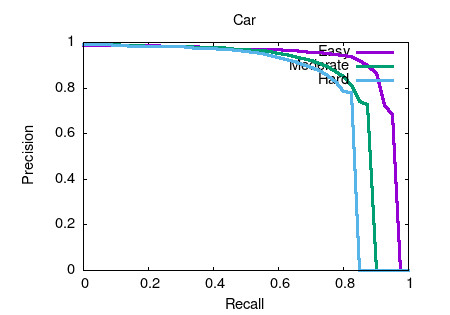
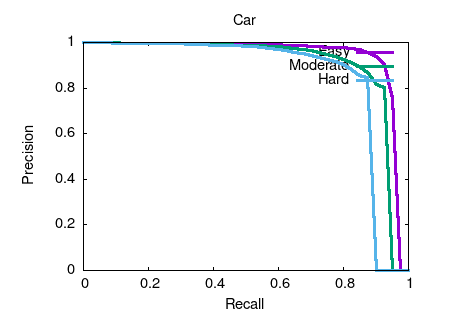
Object detection and orientation estimation results. Results for object detection are given in terms of average precision (AP) and results for joint object detection and orientation estimation are provided in terms of average orientation similarity (AOS).
|