
Submitted on 30 Apr. 2023 15:33 by Bian FeiHu (East China Normal university)
|
Method
Detailed Results
This page provides detailed results for the method(s) selected. For the first 10 test images, we display the synthesized image and an error image.
The error image visualizes the SSIM at every pixel. As the range of SSIM is within [-1,1] with 1 indicating the best performance and -1 indicating the worst, we visualize 1 - (1 + SSIM) / 2 such that bright region means large error and dark means low error.
Test Set Average
|
Test Image 0
 Prediction  Error |
Test Image 1
 Prediction 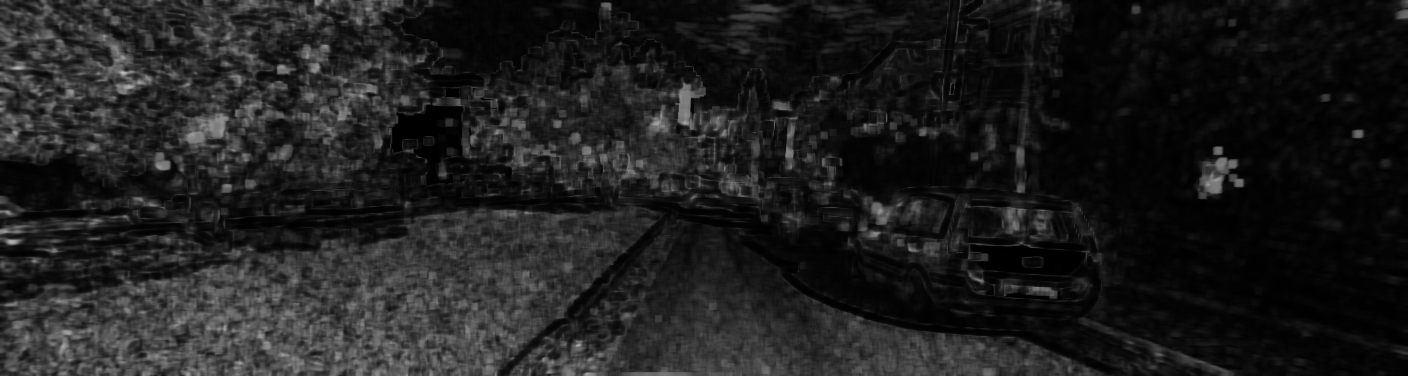 Error |
Test Image 2
 Prediction 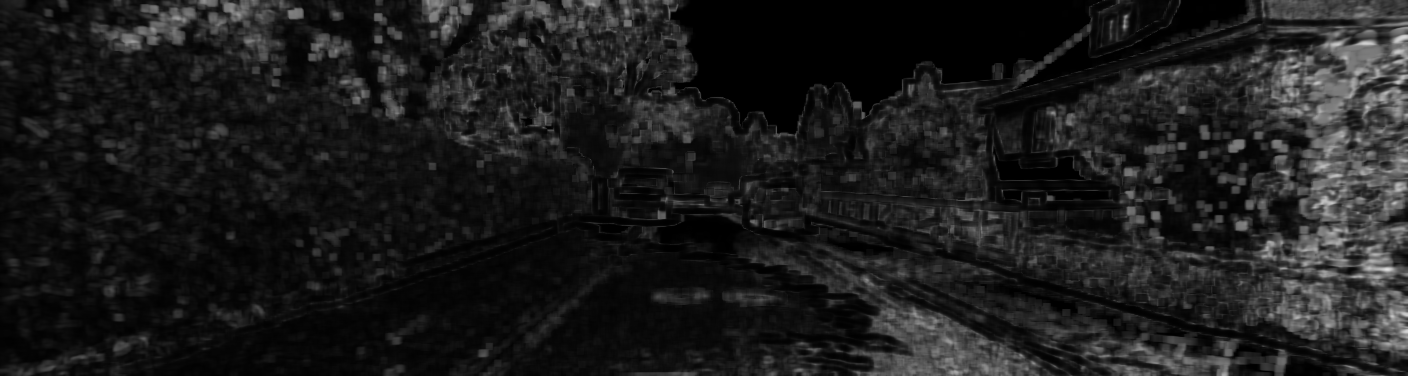 Error |
Test Image 3
 Prediction 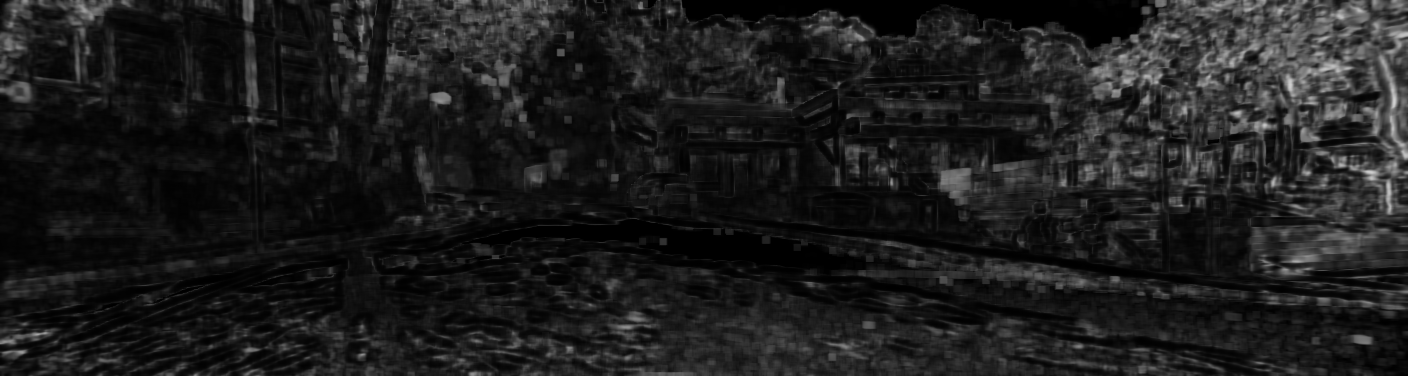 Error |
Test Image 4
 Prediction 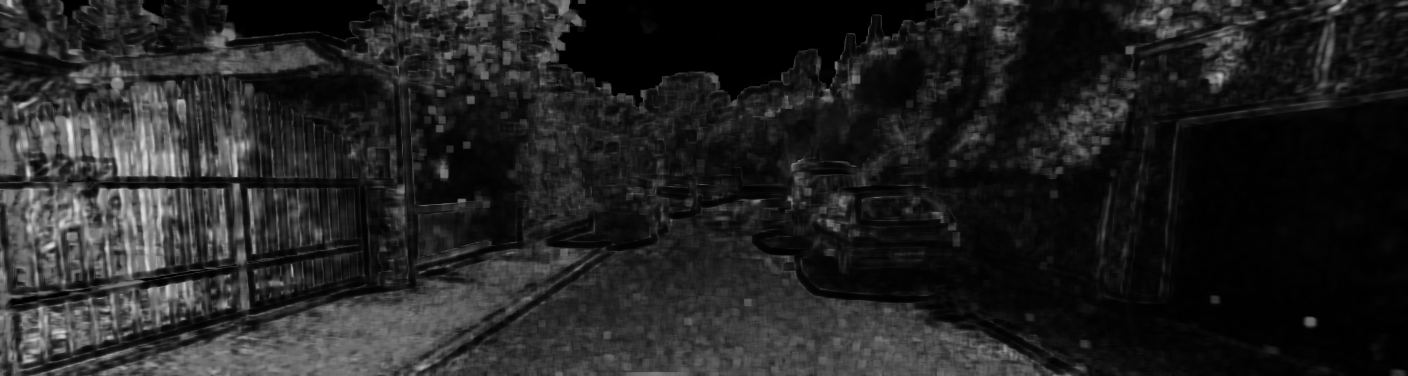 Error |
Test Image 5
 Prediction 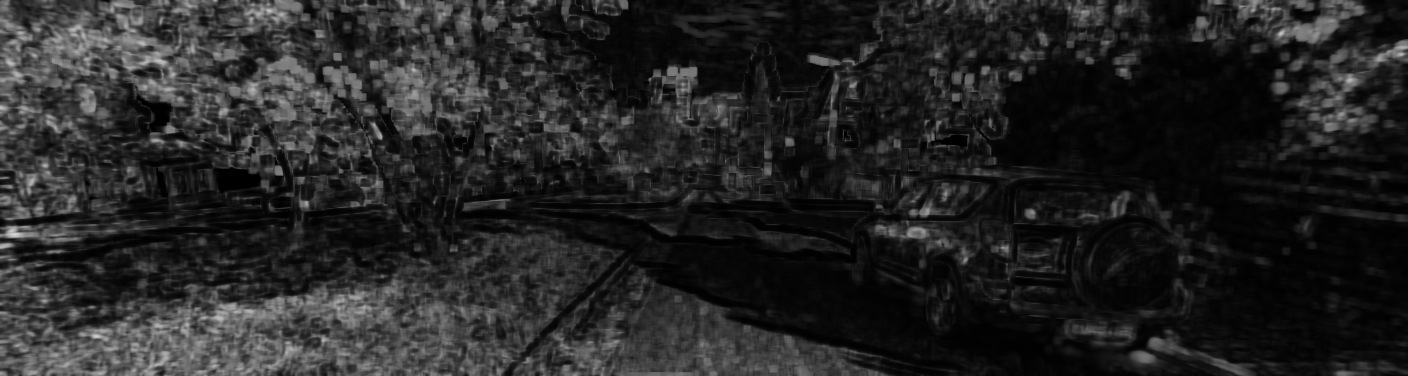 Error |
Test Image 6
 Prediction 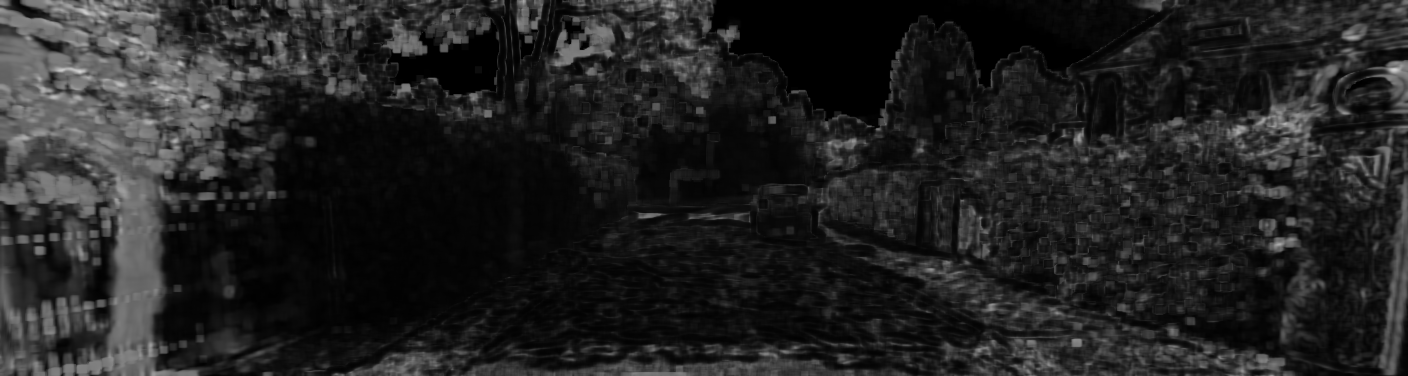 Error |
Test Image 7
 Prediction 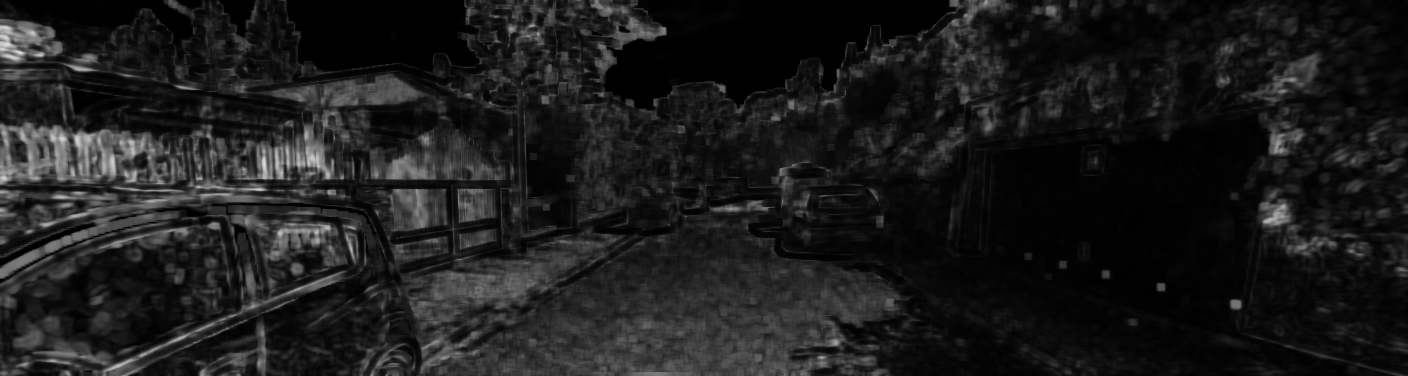 Error |
Test Image 8
 Prediction 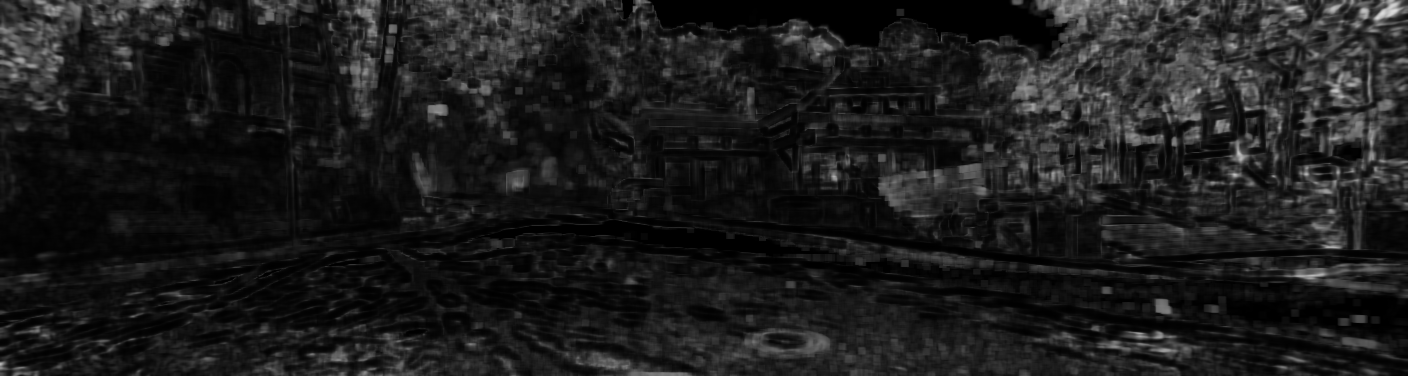 Error |
Test Image 9
 Prediction  Error |