
2D data & labels

Fisheye Images (355G) Fisheye Calibration Images (11G)
Raw images captured by fisheye cameras. We provide a download script for downloading the images in chunks. We also provide calibration sequences.

Perspective Images for Train & Val (128G) Test Semantic (1.5G) Test NVS 50% Drop (0.3G) Test NVS 90% Drop (0.2G) Test SLAM (14G)
Raw images captured by perspective cameras. For images used for training/validation, we provide a download script to download images in chunks. The test image set is used for evaluating both 2D semantic/instance segmentation and novel view appearance/semantic synthesis.

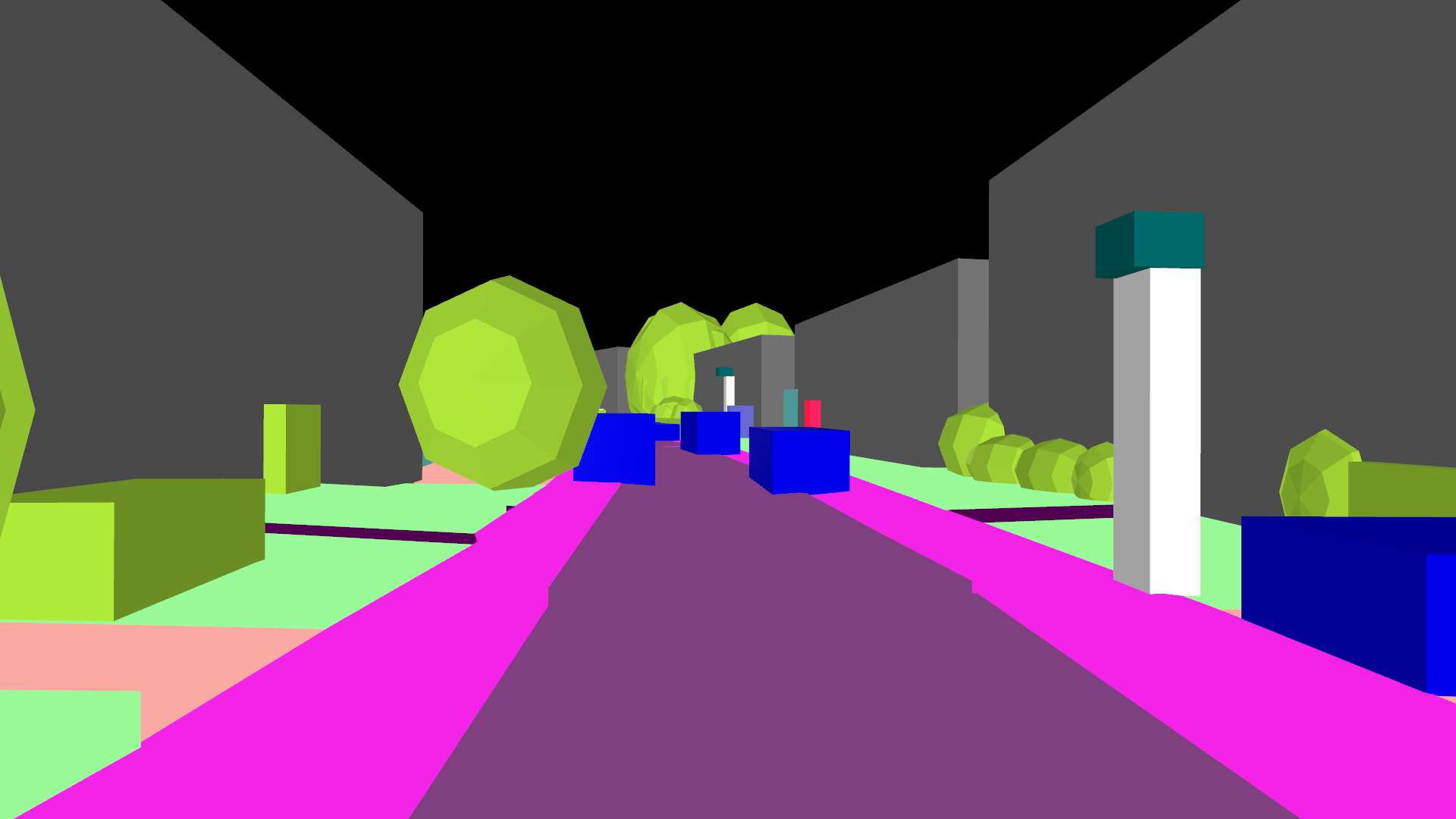
Semantics of Left Perspective Camera (1.8G) Semantics of Right Perspective Camera (1.8G)
2D semantic & instance labels, containing semantic ID, instance ID as well as color-coded semantic images.

Confidence of Left Perspective Camera (44G) Confidence of Right Perspective Camera (44G)
Confidence masks, containing the confidence score of our semantic & inference label.
3D data & labels
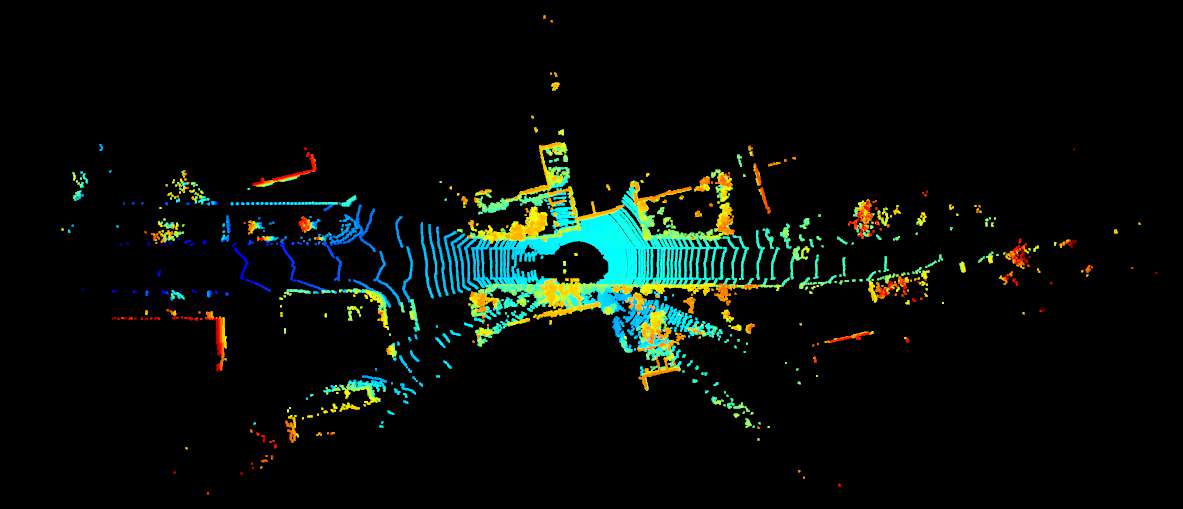
Raw Velodyne Scans (119G) Test SLAM (12G) Test Completion (35M)
Raw 3D scans captured by the Velodyne HDL-64E. We provide a download script for downloading the raw 3D scans in chunks.
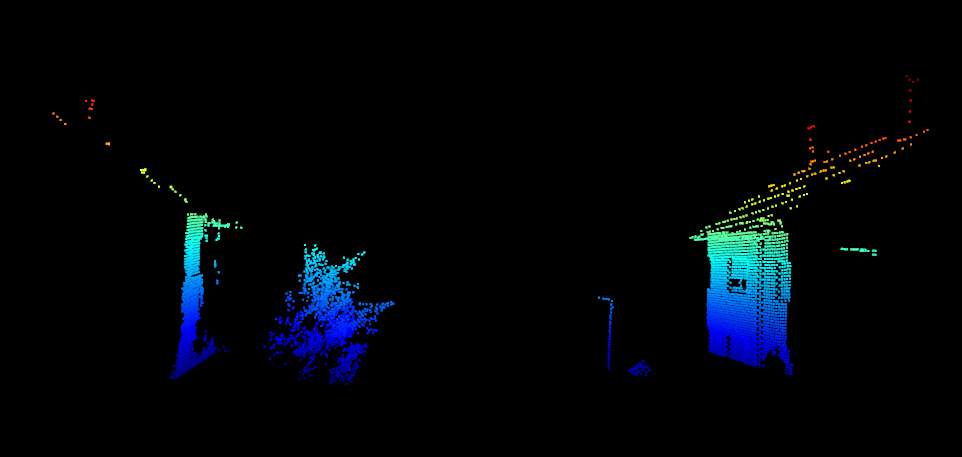
Raw SICK Scans (0.4G)
Raw 3D scans captured by the SICK LMS 200 laser scanner. We provide a download script for downloading the raw 3D scans in chunks.
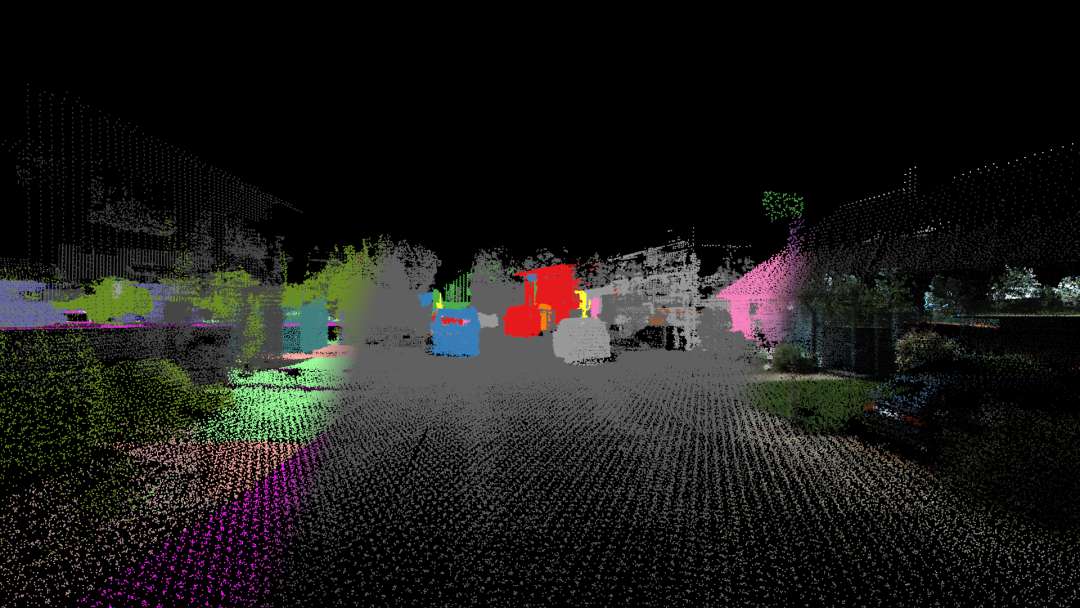
Accumulated Point Clouds for Train & Val (12G) Test Semantic (1.2G)
Accumulated point clouds with RGB colors. Semantic ID, instance ID as well as the confidence are provided for training and validation. The test accumulated point clouds are used for evaluating both 3D semantic/instance segmentation and 3D bounding box detection.
3D Bounding Boxes (30M)
3D bounding boxes, containing all 3D bounding boxes that have a valid instance ID (e.g., buildings, cars).
Calibrations & Poses

Calibrations (3K)
Extrinsics and intrinsics of the cameras and laser scanners.

Vechicle Poses (8.9M)
System poses in a global Euclidean coordinate. Instead of directly converting OXTS measurements to 6D poses, we obtain more accurate poses via a large-scale optimization taking OXTS measurements, laser scans and multi-view images as input.
OXTS Sync Measurements (37.3M) OXTS Raw Measurements (0.4G)
OXTS measurements, including altitude, global orientation, velocities, accelerations, angular rates, accuracies and satellite information. We provide both the synchronized OXTS measurements with the same framerate as the RGB images, and the raw OXTS measuresments at a higher framerate.
Logout | Edit Account