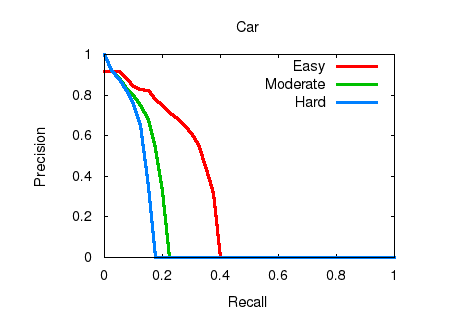
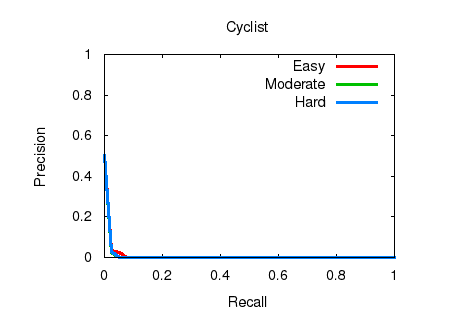
An experiment using the base YOLOv2 416 x 416
detection framework with default weights (without
training on KITTI). The 'person', 'bicycle', and
'car' classes (out of YOLOv2/COCO's 80 object
categories) are considered as 'Pedestrian',
'Cyclist', and 'Car' classes. |
@inproceedings{redmon2016you,
title={You only look once: Unified, real-time
object detection},
author={Redmon, Joseph and Divvala, Santosh and
Girshick, Ross and Farhadi, Ali},
booktitle={Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition},
pages={779--788},
year={2016}
}
@inproceedings{redmon2017yolo9000,
title={YOLO9000: Better, Faster, Stronger},
author={Redmon, Joseph and Farhadi, Ali},
booktitle={Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition},
year={2017}
} |