@article{FernandezBaldera2018,
title = "BAdaCost: Multi-class Boosting with Costs ",
journal = "Pattern Recognition ",
volume = "",
number = "",
pages = " - ",
year = "2018",
note = "",
issn = "0031-3203",
doi = "https://doi.org/10.1016/j.patcog.2018.02.022",
url = "https://www.sciencedirect.com/science/article/pii/S0031320318300748",
author = "Antonio Fernández-Baldera and José M. Buenaposada and Luis Baumela",
keywords = "Boosting",
keywords = "Multi-class classification",
keywords = "Cost-sensitive classification",
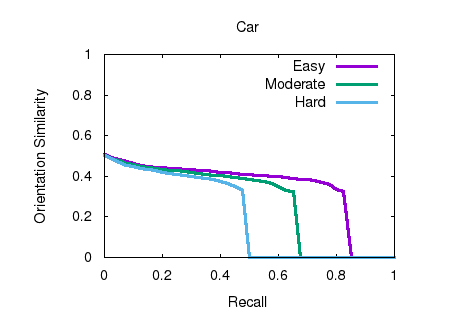
keywords = "Multi-view object detection ",
abstract = "Abstract We present BAdaCost, a multi-class cost-sensitive classification algorithm. It combines a set of cost-sensitive multi-class weak learners to obtain a strong classification rule within the Boosting framework. To derive the algorithm we introduce CMEL, a Cost-sensitive Multi-class Exponential Loss that generalizes the losses optimized in various classification algorithms such as AdaBoost, SAMME, Cost-sensitive AdaBoost and PIBoost. Hence unifying them under a common theoretical framework. In the experiments performed we prove that \{BAdaCost\} achieves significant gains in performance when compared to previous multi-class cost-sensitive approaches. The advantages of the proposed algorithm in asymmetric multi-class classification are also evaluated in practical multi-view face and car detection problems. "
}
|