Karlsruhe Dataset: Labeled Objects (Cars + Pedestrians)
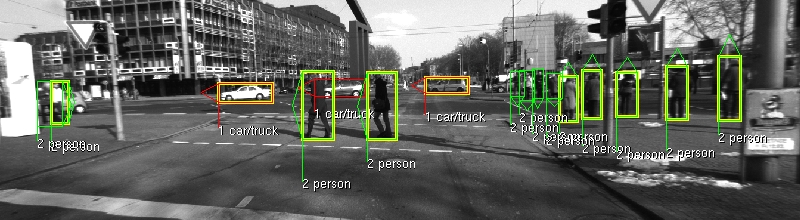
This page contains two datasets with roughly 1000 images each and object bounding boxes for cars or pedestrians (~10000 bounding boxes in total). Furthermore, it contains the orientation of each object, discretized into 8 classes for cars and 4 classes for pedestrians. The .zip files provided below come with a MATLAB-based label viewer. Labels are saved as MATLAB matrices (.mat files), where each row is an object in the image and the columns are position, size, class and orientation of the object. You can use this dataset to train your preferred objected detector. We had very good experiences with the
cascaded part-based L-SVM from Ross Girshick and Pedro Felzenszwalb, which we modifed to fix the latent orientations to the ones given by the labels. We have been able to detect very small objects by upsampling the original images up to a factor of three.
Note: Also try our novel KITTI dataset here!
Download
All datasets on this page are published under the
Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License.
- objects_2011_a.zip: 775 images with car and pedestrian labels. This dataset additionally contains 1155 negative images (no objects) for learning a discriminative object detector, as well as a flag indicating which objects are clearly visible.
- objects_2011_b.zip: 1020 images with car labels.
Citation
This dataset has been used for learning the
part-based object detector in:
@inproceedings{
Geiger2011NIPS,
author = {
Andreas Geiger and
Christian Wojek and
Raquel Urtasun},
title = {Joint 3D Estimation of Objects and Scene Layout},
booktitle = {Advances in Neural Information Processing Systems (NIPS)},
year = {2011}
}