This website maintains a list of older projects and is not updated anymore. For our more recent projects, visit:
https://uni-tuebingen.de/de/122667.
Research Projects
-
Robust Vision Challenge
Competition at CVPR 2018 across various computer vision tasks.
-
DALI 2018
DALI 2018 Workshop on Autonomous Driving Talks.
-
ETH3D Benchmark
Multi-view 3D reconstruction benchmark and evaluation.
-
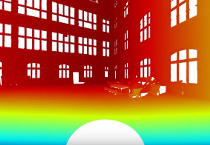
SlowFlow
Exploiting high-speed cameras for optical flow reference data.
-
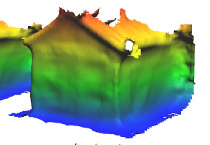
OctNetFusion
Learning coarse-to-fine depth map fusion from data.
-
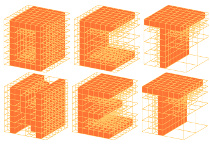
OctNet
Learning 3D representations at high resolutions with octrees.
-
Autonomous Vision
Survey article on research in vision for autonomous vehicles.
-
Similarity Priors
Joint detection and volumetric 3D reconstruction of similar objects.
-
3D Reconstruction
Probabilistic volumetric 3D reconstruction with ray potentials.
-
FollowMe
Computationally Efficient Online Min-Cost Flow Tracking.
-
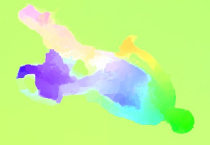
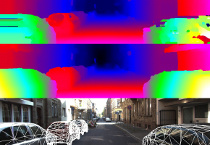
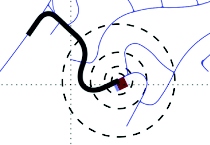
Discrete Flow
Optical flow estimation cast as inference in a discrete CRF.
-
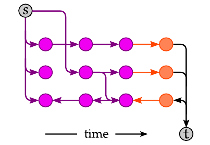
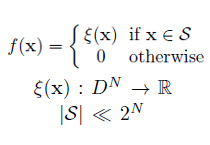
LIBSMS
Efficient MAP inference with sparse high-order potentials.
-
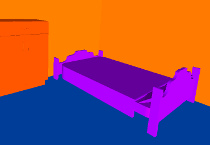
Indoor Scenes
3D layout and 3D object inference from a single RGB-D image.
-
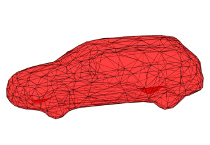
Semi-Convex Hull
Reduces a complex CAD model to a watertight low-face mesh.
-
Displets
Resolving stereo ambiguities using knowledge about objects.
-
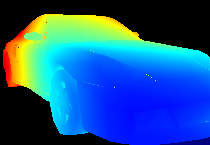
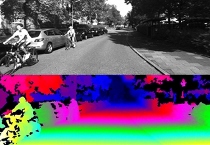
Object Scene Flow
Scene flow for autonomous vehicles. Novel realistic dataset.
-
LIBLABEL
Lightweight MATLAB tool for semantic and instance labeling.
-
LIBRENDER
OpenGl rendering of 3D objects directly from within MATLAB.
-
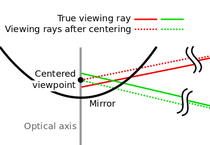
Omnidirectional Vision
Catadioptric camera calibration software and dataset.
-
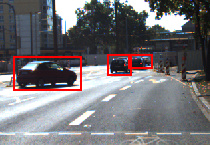
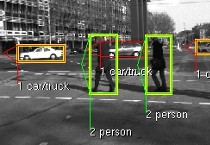
Tracking by Detection
Simple hierarchical object tracker using the DPM detector.
-
TriTrack
Real-time object tracking using sparse scene flow features.
-
3D Urban Scenes
Code and datasets for 3D urban traffic scene understanding.
-
KITTI Vision Suite
Datasets and benchmarks for computer vision and robotics.
-
LOST
Localization in OpenStreetMap data using visual odometry only.
-
LIBCBDETECT
MATLAB code for automatic corner / checkerboard detection.
-
Karlsruhe Objects
Images from a moving vehicle with annotated cars / pedestrians.
-
Karlsruhe Sequences
Urban stereo video sequences recorded from a moving vehicle.
-
LIBELAS
MATLAB / C++ code for efficent large-scale stereo matching.
-
LIBVISO
MATLAB / C++ code for stereo and monocular visual odometry.
-
LIBICP
MATLAB / C++ code for iterative closest point matching (2D/3D).
-
Gaussian Processes
Java Applet illustrating Gaussian Process regression.
-
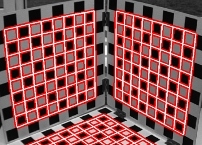
Multi-Cam Calibration
Geometric and photometric multi-camera calibration.